The whole machine is made of high-quality stainless steel, wear-resistant and durable, and meets food hygiene standards. Put the fish in the feeding port of the equipment, and the conveyor chain will automatically send the fish to the cutting blade to open the belly/open back (put the fish belly up to open the belly, and put the fish back up to open the back).
The scope of application is suitable for aquatic product processing plants, meat processing plants, fish canning plants, large-scale catering industries and other units. This product will not cause damage to fish heads, tails and fins.
Trout Gutting Machine,Fish Gutting Machine,Fish Gut Removal Cleaning Machine,Small Fish Gutting Machine Henan Gems Machinery Co.,Ltd , https://www.hngemsmachine.com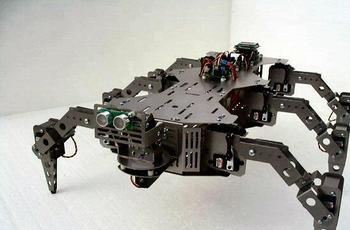 Introduction
Introduction
Imitate the shape, structure and control principle of living creatures to design and manufacture more concentrated, efficient and biometric machines. The discipline that deals with bionic machinery is called bionic mechanics. It was a marginal discipline that was formed through the integration of biology, biomechanics, medicine, mechanical engineering, cybernetics, and electronic technology in the late 1960s. The main areas of biomimetic machinery research are biomechanics, control bodies and robots. By combining the superior structure and physical characteristics that may be applied in a biological system, humans may be able to obtain more sophisticated bionic machinery than certain systems formed in nature.
Introduce
Imitate the shape, structure and control principle of living creatures to design and manufacture more concentrated, efficient and biometric machines. The discipline that deals with bionic machinery is called bionic mechanics. It was a marginal discipline that was formed through the integration of biology, biomechanics, medicine, mechanical engineering, cybernetics, and electronic technology in the late 1960s. In nature, organisms have a high degree of adaptability to the natural environment through natural selection and long-term self-evolution. Their perceptions, decisions, instructions, feedbacks, movements, and other functions and organ structures are far more complete than those that humans have ever made.
history
There is a long history of technology for creating machinery that imitates biomorphic structures.
Leonardo DaVinci of Italy in the 15th century thought that humans could imitate bird flight and draw a diagram of a flapping machine.
By the 19th century, various natural sciences had made great progress. People used aerodynamic principles to make several different types of monoplanes and biplane gliders.
In 1903, the United States W. Wright and O. Wright invented the aircraft. However, for a long period of time, people still lack understanding of what is common between organisms and machines, and thus are limited to physical imitation.
Until the middle of the 20th century, due to the needs of atomic energy utilization, aerospace, marine development, and military technology, it was imperative that mechanical devices should have adaptability and high reliability. In the past, various mechanical devices were far from meeting the requirements, and an urgent need to find a new technology development approach and design theory. With the development of modern biology, people have discovered that organisms have advantages comparable to previous technologies in energy conversion, control and regulation, information processing, azimuth, navigation, and detection. At the same time, "control theory" theory appeared again in the natural sciences. It is the science that studies the control and communication in machines and organisms. Cybernetics is the bridge between the technical systems of communication and the working principle of biological systems. It lays the theoretical foundation for the analogy between machines and organisms.
In September 1960, the first bionics seminar was held in the United States, and the topic of "biological prototype is the key to new technology" was proposed, thus establishing the discipline of bionics, and later formed many branches of the bionics.
In 1960, organized by the American Mechanical Engineering Society, he held a seminar on biomechanics.
In 1970, the Japanese Artificial Craft Research Association hosted the first session of the Bio-Organization, which established the two disciplines of biomechanics and bio-informatics. On this basis, a bionic mechanics was formed.
Research Field Machinery
The main areas of biomimetic machinery research are biomechanics, control bodies and robots. Biomechanics studies life's mechanical phenomena and laws, including biomaterial mechanics and biohydrodynamics, biomechanics and biohydrodynamics. The control body and the robot are engineering systems built based on knowledge gained from living things. Among them, the one controlled by the human brain is called a control body (such as a myoelectric prosthetic hand, equipment), and the one controlled by a computer is called a robot. The main research topics of bionic mechanics include anthropomorphic robots, walking machines, artificial limbs, and various types of machinery that mimic birds, insects, and fish and other organisms.
Anthropomorphic manipulator
Humanoid robots The forelegs of various animals are not identical in terms of appearance and function, but their internal structure is basically the same. The forelimb bones of amphibians, reptiles, birds and mammals are composed of sacrum, forearm bone, carpal bone and phalange. The upper limbs of human beings have high operability, flexibility and adaptability, and robots are developing in the direction of close to human upper limbs. There are 32 bones on one of the upper extremities, driven by more than 50 muscles. 27 spatial degrees of freedom are formed by shoulder joints, elbow joints, and wrist joints. The shoulders and elbows make up 4 degrees of freedom to determine the position of the palm. The wrist has 3 degrees of freedom to determine the palm of the hand. After determining the position and posture from the shoulders, elbows, and wrists, the hand also has to rely on multi-joint five-finger fingers and soft palms in order to grasp the objects for various delicate and complicated movements. The fingers are composed of 26 bones with 20 degrees of freedom, so the fingers can be used for various dexterous operations. With the coordination of so many degrees of freedom, the muscles can exert great power under the instant movement. The ratio of maximum output to self-respect is much higher than any machine made by humans. The muscle control mechanism has multiple automatic control mechanisms and safety mechanisms, and instructions from the brain can reach various parts of the hand. It is very difficult to realize such functional features and information processing systems from engineering and technology. The generally developed multi-joint manipulators are also limited to 7 degrees of freedom of the arms and 1 degree of freedom of the claws, and some people are studying the 3 finger grippers. In addition, there is a flexible manipulator that mimics functions such as a nose, which is characterized by a high degree of adaptability. In 1983, the Changchun Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, developed a seven-degree-of-freedom anthropomorphic manipulator controlled by a microcomputer.
Walking machine
In order to increase the adaptability of mobile machines to the environment and to expand the space for mankind to ride on rugged terrain such as the bottom of the sea, the Arctic, mining areas, planets, and swamps, walking machines need to study walking mechanisms that simulate living things. Most animal movements are achieved through multiple joints. Therefore, animal foot morphology, function, movement and posture stability control are the key to the study of walking machine. Humans and birds are two-legged, frogs, turtles, dogs, and horses are four-legged. Insects are six-legged. Crabs and spiders are eight-legged. The number of feet directly affects the stability of the posture. Six animals on the ground to use at least three feet. Because the attitude of the body of gravity is formed by the three points of the foot, the static is stable. When the four-legged animal walks slowly at the same time, the three legs are on the ground and the two feet are on the ground when they are running. They are stabilized by a random attitude. The biped is a bit unstable when it is walking. It is an unstable system and it is difficult to control. Some countries have developed two-legged, three-legged, four-legged, six-legged, eight-legged walking machines. Waseda University in Japan developed WABOt-1 WL-5 bipedal walking machine in 1973, and Tokyo University of Technology developed mechanical snake model in 1972. In 1981, the Changchun Institute of Optics and Fine Mechanics of the Chinese Academy of Sciences developed a four-legged and six-legged walking machine model.
Prosthetics
Divided into upper limb prosthesis and lower limb prosthesis. Upper extremities are smarter and more flexible than the lower extremities, and their structures are also more complicated. Generally, the shape and structure of the prosthetic hand are similar to those of the human hand. With the development of electronic technology and biomedical engineering, prosthetics have evolved from decorative prosthetics and mechanical traction prostheses to myoelectric prostheses. The electromyographic hand is a brain that sends a set of bioelectrical impulses to the muscles through the spinal cord and nervous system, and uses an electrode mounted on the surface of the arm's skin to receive instructions to drive the prosthetic hand. This kind of artificial hand is controlled by the will of the person and can achieve a multi-functional, human-like action. Tsinghua University in China developed a myoelectric prosthetic hand in 1983.
The main function of the lower limbs is to walk with a heavy weight, which requires stability, adaptability, and flexibility. The lower limbs include the hip, knee, ankle, and foot facets. It should be more solid and stable in structure to suit the physiological functions of the lower extremities. The weight of the body is transmitted to both feet through the hip and femoral head. The knee joint guarantees certain relative movement between the thigh and lower leg to ensure the stability of the human body. The United States has also conducted research on the installation of mechanical bones, the so-called "crab shells," on the outside of the human body. After the human's hand-foot movement information is detected by a machine, the mechanical bones are driven again. The ability to withstand external forces through mechanical bones can increase human power many times, that is, with the aid of machinery, it can expand human capabilities and adaptability to the outside world.
Other bionic machinery
Other bionic machines mimic the morphological and structural characteristics of birds, insects, and fish, and develop various mechanical technology systems that are suitable for airborne and underwater activities, and are also the contents of bionic machines. The animal species that can fly in nature is close to 3/4 of all animals, of which there are more than 600 species of birds and 350,000 species of insects. These flying animals provide natural prototypes for humans to improve aircraft performance and manufacture new types of aircraft. Certain special functions of birds and insects, such as the sudden take-off of insects such as mosquitoes, flies and bees, high-frequency vibration of inverted wing wings, glossy overhangs, and fixed airborne rates, are not possible with modern aircraft. The dragonfly not only flies faster, but also fly higher and fly far because it has soft, thin wings and can fly at speeds of up to 50 km/h. The wings on the wings have the characteristic of eliminating the flutter of the wings in flight. According to this feature, similar parts of the aircraft are thickened in the aircraft design to overcome the fluttering of the wing. In addition, energy-saving flights such as desert and golden eagles can be used for reference in aircraft design.
According to the principle that ultrasonic waves generated by the bat's throat can be navigated in the air and its position on the food in the air, humans invented the radar. According to the principle of compound eyes of flies and cockroaches, humans invented the compound eye lenses of copiers and printers. According to the principle that the rattlesnake's cheek fossa can sense the temperature change of 0.001°C, humans invented the rattlesnakes that track the pursuit. Humans have also designed crickets using the principle of frog leap; imitating the highly sensitive olfactory sense of the police dogs has made "electronic police dogs" for detection.
Bionic Dolphin
Whales, dolphins and all kinds of fish have evolved over millions of years and have formed a variety of shapes that adapt to the water. Among them are imitation hammers adapted to fast voyage; adapted to the flatness of the slow motion of the water bottom; adapted to the cylindrical shape penetrating into the earth or cave. The finned swordfish can reach speeds of up to 110 km/h and can reach full speed in a matter of seconds. This is what modern speedboats cannot. In addition to being suitable for navigation outside the body, fish also has special propulsion and sinking functions. Based on the biomechanical principle of the tail fin oscillating propulsion system for aquatic animals, humans have designed a oscillating plate propulsion system. It can not only allow the vessel to turn and avoid obstacles with great flexibility, but also can smoothly pass shallow waters or sandbars without stranding. The jellyfish jellyfish use a sensory cell to control the gas in the float to make the body ups and downs. Tuna floats up and down by controlling a physiological and chemical reaction in the body. Based on these principles, humans have developed a submersible floating system. Although the squid's body is not the same as the fish, but the organ is very complete, it rely on the contraction of the abdominal muscles to the water from the mantle out of the nozzle quickly to advance the body. According to this principle, humans designed a water spray boat. Humans also imitate the characteristics of dolphin skin to reduce the water resistance and create an "artificial dolphin skin."